End-Cap Data Acquisition
US Muon Software Workshop
Tufts University
Kevan Hashemi
Brandeis University
24 May 2007
This talk on the web at:
http://www.bndhep.net/ATLAS/MSW_07/Index.html
Contents
Introduction
LWDAQ Architecture
End-Cap DAQ Architecture
Hardware Components
Control Components
Control Architecture
People
ARAMYS
Readout Rate
Status
Introduction
End-Cap Alignment System:
- The ATLAS muon spectrometer has three parts:
- Barrel
- End-Cap, A-Side
- End-Cap, C-Side
- End-cap alignment system measures geometry of end-caps.
- The A-Side system measures geometry of A-Side End Cap.
- The C-Side system measures geometry of C-Side End Cap.
- Brandeis University designed and provided for the end-cap alignment:
Barrel Alignment System:
- Barrel alignment system measures barrel geometry.
- NIKHEF designed and manufactured barrel alignment electronics.
- Barrel and end-cap electronics are incompatible.
LWDAQ Architecture
Long-Wire Data Acquisition (LWDAQ) supports cables up to 130 m.
Each LWDAQ Driver performs one DAQ action at a time.
End-Cap DAQ Architecture
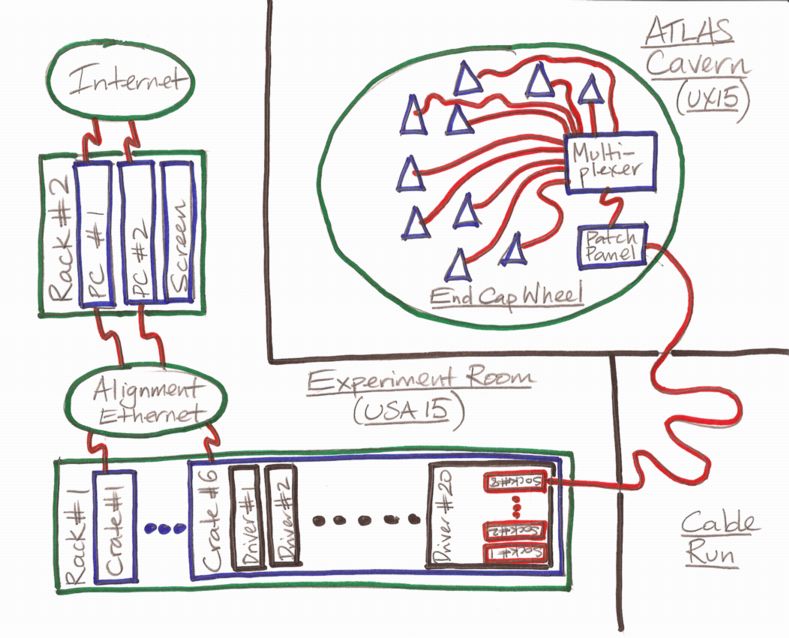
Hardware Components
- ≈ 5000 devices in end-caps.
- ≈ 800 10-socket multiplexers in end-cap wheels.
- ≈ 150 patch panels on rims of end-cap wheels.
- ≈ 100 8-socket drivers in USA15.
- ≈ 5000 white (branch) cables, each up to 10 m long in end-caps.
- ≈ 800 blue (root) cables, each up to 130 m long, in cable runs.
- 5 VME crates in Rack 1.
- 2 Linux PCs and 1 screen in Rack 2.
Control Components
Component, Location, Communication:
- Conditions Database, Anywhere, Internet
- ATLAS Slow Controls, Anywhere, Internet
- ARAMYS Geometric Reconstruction, Anywhere, Internet
- Linux PCs, USA15, Internet and Alignment Ethernet.
- VME-TCPIP Interfaces, USA15, VME Backplane and Alignment Ethernet.
- LWDAQ Drivers, USA15, VME Backplane and LWDAQ Protocol.
- Alignment Devices, End Caps, LWDAQ Protocol
Control Architecture
- LWDAQ Drivers:
- receive commands (eg. Flash, Read, Sleep) over VME Backplane
- control devices over long cables
- flash lights, read out images
- VME-TCPIP Interfaces:
- receive commands (eg. Flash, Read, Sleep) over Alignment Ethernet
- pass commands to LWDAQ Drivers over VME Backplane
- send images over Alignment Ethernet
- Rack-Mounting Linux PCs:
- receive commands (eg. Run, Stop, Reset) over Internet
- run LWDAQ Software
- send commands (eg. Flash, Read, Sleep) over Alignment Ethernet
- receive images over Alignment Ethernet and analyze
- serve alignment measurements to Internet
- ATLAS Slow Controls:
- sends commands (eg. Run, Stop, Reset) over Internet
- downloads alignment measurements over Internet
- stores alignment measurements in Conditions Database
- ARAMYS Reconstruction:
- reads alignment measurements from Conditions Database
- determines end-cap geometry
- uploads geometry to Conditions Database
People
- Christoph Amelung (CERN)
- Wrote ARAMYS Geometric Reconstruction program
- Checks calibration of alignment devices at CERN
- Full-time installing and alignment system at CERN
- James Bensinger (Brandeis University)
- Leader of USA end-cap alignment effort
- Designed proximity cameras and calibration systems
- Half-time at CERN installing alignment system
- Andrei Dushkin (Brandeis University)
- CAD drawings, layout, and integration of alignment system
- Frequently at CERN installing alignment system
- Joe Rothberg (University of Washington)
- Interface between ATLAS Slow Controls and End-Cap Alignment System
- Kevan Hashemi (Brandeis University)
- Wrote LWDAQ Software.
- Designed all end-cap alignment electronics and the
BCAM
- Rarely at CERN.
ARAMYS
Takes as input:
- alignment device calibration constants (from Brandeis University).
- measurements of alignment bars (from Freiburg University).
- definition of end-cap geometry, including alignment bars and muon chambers.
- arrangement of alignment devices upon geometry.
- latest alignment measurements.
- most-recently valid alignment measurements.
Produces as output:
- locations of all device mounts
- location of chambers
- location of wires
- sagitta correction map
- deviations from nominal positions
- worste-performing sensors
Also applied to:
- sub-sets of end-cap, such as a single big wheel
- optical calibration-checking stands
Readout Rate
Time-Consuming Steps:
- image capture by LWDAQ Driver: 50 ms/image
- image transfer by LWDAQ Driver over VME Backplane: 50 ms/image
- image transfer by VME-TCPIP Interface over Alignment Ethernet: 400 ms/image
- image analysis by Linux PC: 50 ms/image (average of BCAMs and RASNIKs)
- geometric reconstruction by ARAMYS: 5 minutes/end-cap.
Geometry Update Process:
- Each Linux PC handles one end-cap, running in parallel.
- Each Linux PC captures and analyzes one image at a time.
- Each end-cap cycle captures ≈5000 images.
- geometric reconstruction takes place in parallel.
Total Geometry Update Time Now: 50 min.
Slowest step is image transfer by VME-TCPIP Interface, 400 ms/image.
New version this year, will transfer images at 150 ms/image.
Total Geometry Update Time Expected: 30 min.
Status
- Now running big wheel alignment in ATLAS hall from USA15.
- Reconstruction is self-consistent to better than 100 μm.
- Harware working well across 130-m cables.
- LWDAQ Sotware working well on Big Wheel.
- Expect no problems scaling to full end-cap.
- Will deliver faster VME-TCPIP Interfaces this year.
- Even with faster interfaces, update time will be 30 min.
- One outstanding hardware problem, discovered during installation:
- Some RASNIK masks over-heat when left on for ten hours.
- Power surges and data acquisition errors can turn them on by mistake.
- We have to be careful to turn everything off every few hours.