BCAM = Brandeis CCD Angle Monitor
Designed at Brandeis University for ATLAS End-Cap Muon Spectrometer.
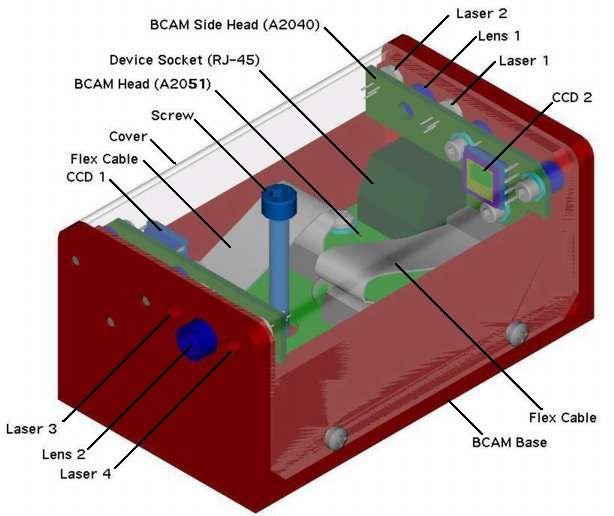
Camera: lens, aperture, 75-mm light path, glass window, image sensor.
Sources: red laser diodes, thin glass window, no collimating lens.
Readout: LWDAQ hardware via Ethernet and TCP/IP.
Analysis: LWDAQ software for Windows, Linux, and MacOS.
Camera behaves like a thin-lens camera.
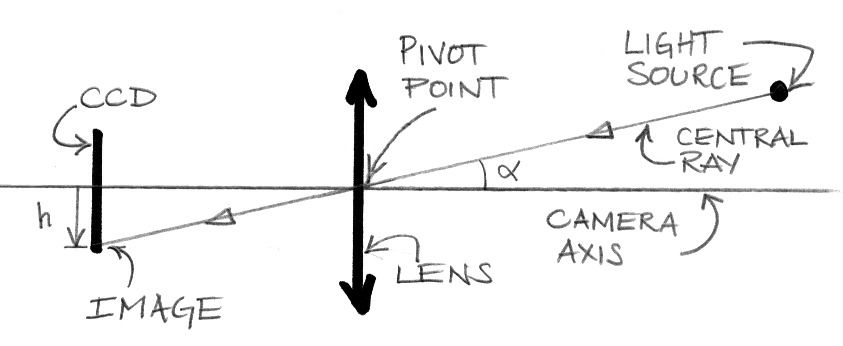
Sources behave like point sources.
Field of View: 40 mrad × 30 mrad
Relative Accuracy (across field of view): 5 μrad
Absolute Accuracy (with respect to mount): 50 μrad
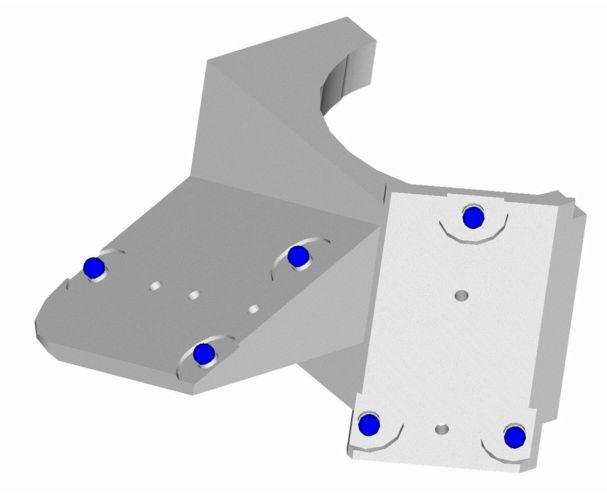
BCAM mounts kinematically on three steel balls.

Fastened with a single screw through the chassis.

Coordinates of three balls define a mount coordinate system.
Calibrate cameras and sources using a roll-cage and CMM.
Determine camera parameters in mount coordinates:
Determine source parameters in mount coordinates:
Two or more BCAMs share a mounting plate.
Reference balls on plate define its plate coordinate system.
Any rigid object with mounting balls acts as a mounting plate.
Measure plate with CMM to 2 μm.
Relative orientations of mounts known to 30 μrad.
Cameras look at sources on other plates.
Cameras on each plate cooperate to measure large angles.
Large Angle Accuracy: relative 7 μrad, absolute 70 μrad.

Cameras look up and down a corridor.
Each camera makes a sagitta measurement.
Sagitta Angle Accuracy: relative 7 μrad, absolute 7 μrad.
Input:
We expect BCAM systems to produce twice as many measurements as necessary.
We determine geometry by steepest descent fitting.
We use ARAMyS, developed at CERN by Christoph Amelung.
Output:
We reject measurements with extraordinary errors, and fit again.
Now building ATLAS End-Cap Alignment System.
Contains a grid of bars that hold BCAMs.
Longest camera-source range is 16 m, longest bar is 9 m.
Blue bars are those implemented in H8 Test Stand.
Named after its location at CERN.
A full-size subset of ATLAS geometry in operation from 2001 to 2005.
Photogrammetry and particle beam verified BCAM performance.
Results reported in Reference Bars for the Alignment of the ATLAS Muon Spectrometer.
36 BCAMs installed, rejected measurements from 2 cameras.
Relative Accuracy: < 20 μm.
Absolute Accuracy: < 200 μm.
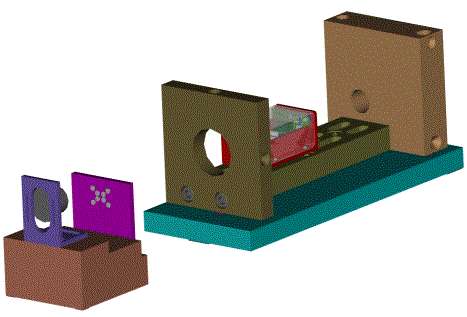
A BCAM will see its own sources reflected in a retroreflector.
A retroreflector costs about the same as a BCAM (≈$300).

Advantages of Retroreflector:
Disadvantages of Retroreflector:
CMS made up of disks.
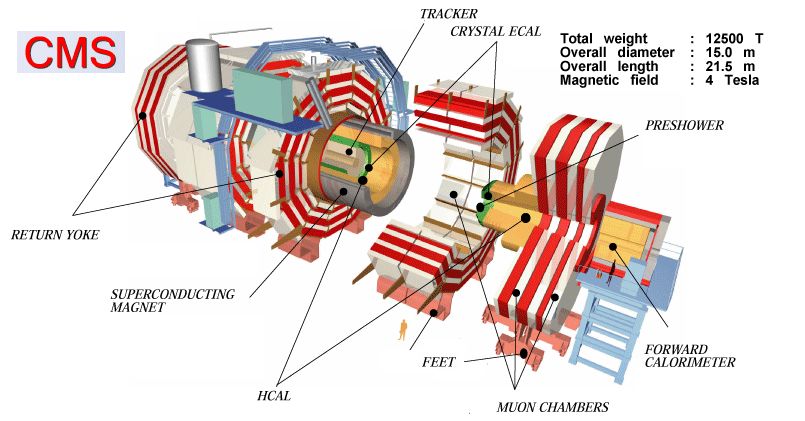
Disks slide together on rails.
Need to monitor disk positions to 1 mm transverse to motion.
Neet to monitor in real-time during closure.
Disks move several meters.
CERN survey group decided to use BCAMs and retroreflectors.
Two alignment corridors pass through all disks at shoulder-height.

BCAMs on outer disks, retroreflectors on inner disks.

Relative Accuracy ≈ 80 μm (exceeds requirement)
Dominant Error Source: CMM measurements, BCAM calibration.
Absolute accuracy ≈ 1 mm (meets requirement)
Dominant Error Source: survey of plates.
The ALICE space frame supports its detector barrel.

120 BCAMs in two rings monitor space frame deformation.
Serial number label visible from viewing BCAM.
Status: installed.
Alignment system for the forward muon spectrometer.
300 BCAMs monitor longitudinal and tranverse displacements.
Status: installation in progress.

Two BCAMs fastened to telescope structure with C-clamps.
BCAMs monitor telescope strut bending.